III.A General Geometric Characterization Theories
A general geometric characterization of porous media should satisfy the following requirements:
-
It should be well defined in terms of geometric quantities.
-
It should involve only parameters which are directly observable or measurable in an experiment independent of the phenomenon of interest.
-
It should not require the specification of too many parameters. The required independent experiments should be simple and economical to carry out. What is economical depends on the available data processing technology. With current data processing technology a characterization requiring more than
-
The characterization should be usable in exact or approximate solutions of the equations of motion governing the phenomenon of interest.
The following sections discuss methods based on porosities
| Characterization | well defined | predictive | economical | easily usable |
|---|---|---|---|---|
| yes | yes | yes | yes | |
| yes | yes | yes | yes | |
| yes | yes | no | yes | |
| no | no | yes | yes | |
| yes | yes | yes | yes | |
| yes | no | no | no |
III.A.1 Porosity and Other Numbers
III.A.1.a Porosity
The porosity of a porous medium is its most important geometrical property. Most physical properties are influenced by the porosity.
The porosity
| (3.1) |
which gives the volume fraction of pore space.
Here
The definition (3.1) is readily extended to
stochastic porous media.
In that case
| (3.2) | ||||
where the last line holds only if the medium is stationary.
| (3.3) |
exists and equals
Equation (3.3) represents always an idealization.
Geological porous media for example are often heterogeneous
on all scales [5].
This means that their composition or volume fraction
The definition of porosity in (3.1) gives the so called total porosity which has to be distinguished from the open porosity or effective porosity. Open porosity is the ratio of accessible pore volume to total volume. Accessible means connected to the surface of the sample.
The porosity of a simple porous medium
| (3.4) |
Therefore porosity is conveniently determined from measuring densities using liquid buoyancy or gas expansion porosimetry [3, 1, 77, 2]. Other methods of measuring porosity include small angle neutron, small angle X-ray scattering and quantitative image analysis for total porosity [2, 77, 78, 43, 44]. Open porosity may be obtained from Xylene and water impregnation, liquid metal impregnation, Nitrogen adsorption and air or Helium penetration [77, 44].
Porosity in rocks originates as primary porosity during sedimentation or organogenesis and as secondary porosity at later stages of the geological development [1]. In sedimentary rocks the porosity is further classified as intergranular porosity between grains, intragranular or intercrystalline porosity within grains, fracture porosity caused by mechanical or chemical processes, and cavernous porosity caused by organisms or chemical processes.
III.A.1.b Specific Internal Surface Area
Similar to the porosity the specific internal surface area is an important geometric characteristic of porous media. In fact, a porous medium may be loosely defined as a medium with a large “surface to volume” ratio. The specific internal surface area is a quantitative measure for the surface to volume ratio. Often this ratio is so large that it has been idealized as infinite [78, 43, 79, 80, 81, 82, 83, 84, 85] and the application of fractal concepts has found much recent attention [58, 86, 87, 88, 84, 42, 89, 90, 91]
The specific internal surface
| (3.5) |
where
The specific internal surface is a characteristic inverse
length giving the surface to volume ratio of a porous medium.
Typical values for unconsolidated sand are
Specific internal surface area can be measured by similar
techniques as porosity.
Some commonly employed methods are given in Figure 1
together with their ranges of applicability.
Particularly important methods are based on physisorption
isotherms [93, 94].
The interpretation of the BET-method [93] is restricted
to certain types of isotherms, and its interpretation requires
considerable care.
In particular, if micropores are present these will be filled
spontaneously and application of the BET-analysis will lead
to wrong results [44].
Other methods to determine
III.A.2 Correlation Functions
Porosity and specific internal surface area are merely two numbers characterizing the geometric properties of a porous medium. Obviously these two numbers are not sufficient for a full statistical characterization of the system. A full characterization can be given in terms of multipoint correlation functions [96, 97, 98, 99, 100, 101, 102, 103, 104, 6, 105, 106, 107, 108, 109, 110, 111, 112, 8].
The average porosity
| (3.6) |
in terms of the expectation value of the random variable
| (3.7) |
For a stationary medium the covariance function depends only on
the difference
| (3.8) |
Because
| (3.9) |
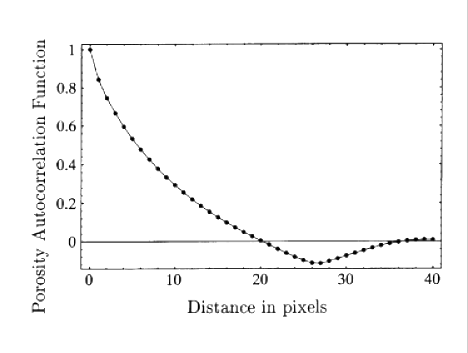
An illustration of a two point correlation function can be seen
in Figure 14.
The porosity in (3.6) is an example of a moment function.
The general
| (3.10) |
where the average is defined in eq. (2.11) with respect to the probability density of microstructures given in eq. (2.10). The covariance function in (3.7) or (3.8) is an example of a cumulant function (also known as Ursell or cluster functions in statistical mechanics). The n-th cumulant function is defined as
| (3.11) |
where the second equality assumes stationarity.
The cumulant functions are related to the moment functions.
For
| (3.12) | ||||
| (3.13) | ||||
| (3.14) | ||||
The analogous moment functions may be defined for the matrix space
| (3.15) |
Therefore
The case
| (3.16) |
In two dimensions an analogous formula holds in which
The practical measurement of two point correlation functions
is based on Minkowski addition and subtraction of sets [10, 37].
The Minkowski addition of two sets
| (3.17) |
Note that
| (3.18) |
where
| (3.19) |
where
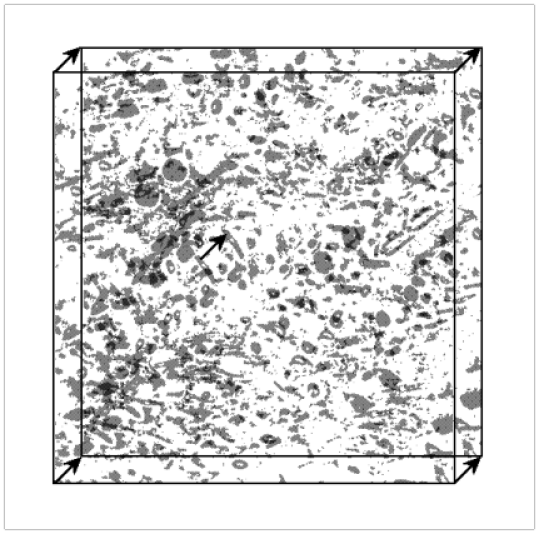
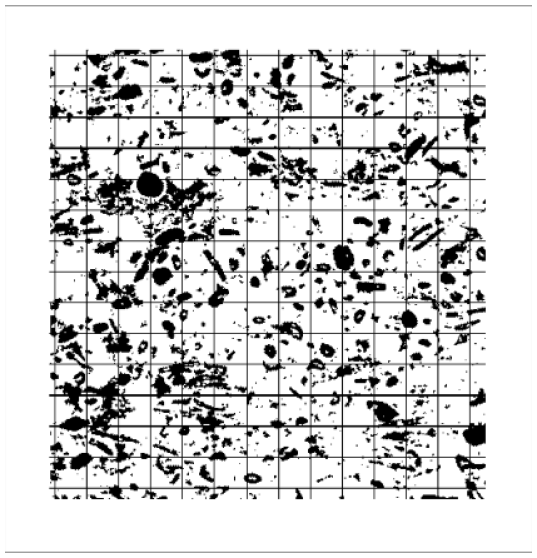
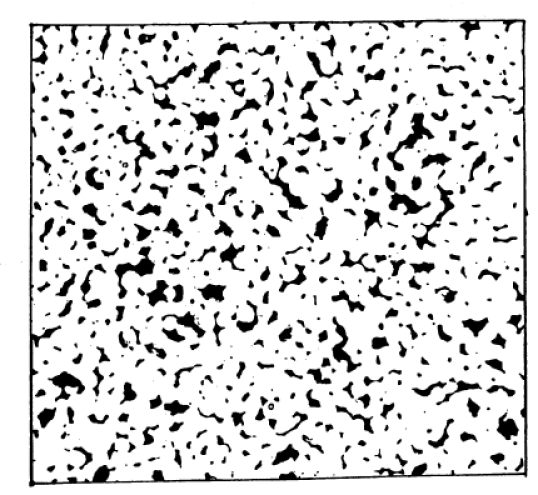
The original image (shown Figure 12) is obtained from
a cross section micrograph of a Savonnier oolithic sandstone.
Two copies of the image are displaced relative to each other
by a vector
The main advantage of the correlation function method for
characterizing porous media is that it provides a set of
well defined functions of increasing complexity for the
geometrical description.
In practice one truncates the hierarchy of correlation
functions at the two-point functions.
While this provides much more information about the geometry
than the porosity and specific surface area alone, many
important properties of the medium (such as its connectivity)
are buried in higher order functions.
2 (This is a footnote:) 2
Two points are called connected if there exists a path between
them which lies completely inside the pore space.
Therefore the probabilistic description of connectedness
properties requires multipoint correlation functions
involving all the points which make up the path.
Depending on the required accuracy a simple two point function
for a three dimensional stationary but anisotropic two
component medium could be specified by
III.A.3 “Pore Size” Distributions
In certain porous materials such as wood (see Figure 5)
it is natural to identify cylindrically shaped pores and to
represent their disorder through a distribution of pore
diameters.
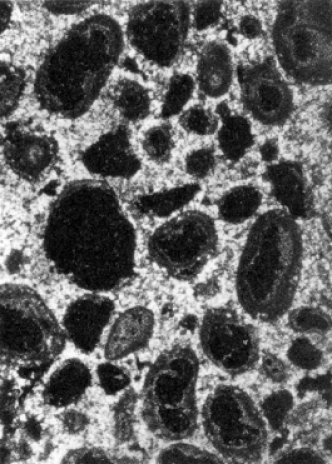
In other media such as systems with cavernous or oomoldic
porosity it is possible to identify roughly convex pore
bodies analogous to convex sand grains dispersed in
a uniform background.
If the radius
| (3.20) |
giving the probability that the random radius
Nevertheless many authors have introduced a variety of well defined probability distributions of length for arbitrary media which intended to overcome the stated difficulty [3, 2, 113, 114, 115, 116, 117, 118, 119]. The concept of pore size distributions enjoys continued popularity in most fields dealing with porous materials. Recent examples can be found in chromatography [120, 121], membranes [122, 123, 124], polymers [125], ceramics [126, 127, 128, 129], silica gels [130, 131, 132], porous carbon [133, 134], cements [135, 136, 137], rocks and soil science [138, 139, 140, 141, 142, 143], fuel research [144], separation and adhesion technology [30, 145] or food engineering [146]. The main reasons for this popularity are adsorption measurements [147, 30, 148] and mercury porosimetry [149, 150, 151, 152].
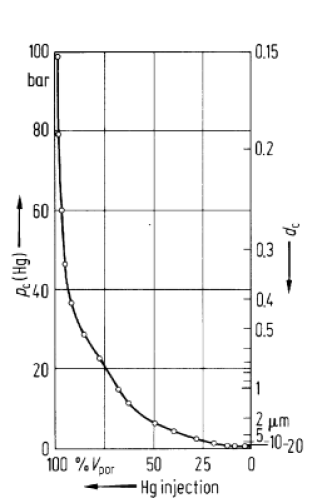
III.A.3.a Mercury Porosimetry
The “pore size distribution” of mercury porosimetry is not a geometric but a physical characteristic of a porous medium. Mercury porosimetry is a transport and relaxation phenomenon [43, 153], and its discussion would find a more appropriate place in chapter V below. On the other hand “pore size distributions” are routinely measured in practice using mercury porosimetry, and many readers will expect its discussion in a section on pore size distributions. Therefore pore size distributions from mercury porosimetry are discussed already here together with other definitions of this important concept.
Mercury porosimetry is based on the fact that mercury is a strongly
nonwetting liquid on most substrates, and that it has a high
surface tension.
To measure the “pore size distribution”
a porous sample
| (3.21) |
For rocks a contact angle
| (3.22) |
for the capillary pressure
The fact that
Although
 |  |
III.A.3.b Random Point Methods
Several authors [3, 113, 116] suggest to define
the “pore size” by first choosing a point
| (3.23) |
Here
In a more sophisticated version of the same idea the set
The main weakness of such a definition is that it is imprecise.
This becomes apparent from the fact that the randomness
of the pore sizes
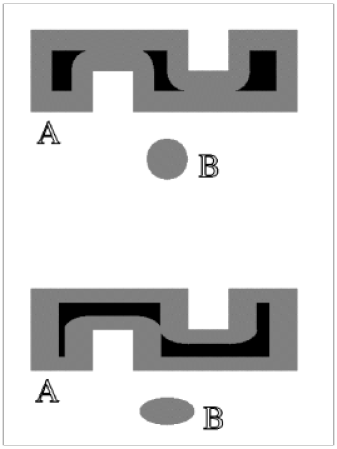
III.A.3.c Erosion Methods
Another approach to the definition of a geometrical pore size
distribution [117, 118, 119] is borrowed from the
erosion operation in image processing [161, 162].
Erosion is defined in terms of Minkowski addition and subtraction
of sets introduced above in (3.17) and (3.18).
The erosion of a set
The method for locating “pore chambers”, “pore channels” and
“pore throats” suggested in [117] is based on eroding
the matrix space
A drawback of this procedure is that it is less unique than
it seems at first sight.
The network constructed from eroding the pore space is not unique
because the erosion operation involves the set
III.A.3.d Hydraulic Radius Method
The hydraulic radius method [114, 115, 2]
for determining pore size distributions is based
on the idea of “symbolically closing pore throats”.
The definition of pore throats is given in terms of
“cross sections” of the pore space.
A cross section
| (3.24) |
where the minimum is taken over the unit sphere of orientations
of the planes.
A pore throat is now defined as a local minimum
of the function
The definition of pore throats in hydraulic radius methods is very sensitive to surface roughness. This is readily seen from an idealized spherical pore with a few spikes. Another problem as remarked in [115], page 586, is that “the size of a pore body is not readily related in a unique manner to any measurable physical quantity”.
III.A.4 Contact and Chord Length Distributions
Chord length distributions [163, 164, 165, 166]
are special cases of so called contact distributions
[10, 37].
Consider the random matrix space
| (3.25) | ||||
for
For a unit sphere
| (3.26) |
The spherical contact distribution
For the unit interval
| (3.27) |
where the denominator on the right hand side gives the mean
chord length
| (3.28) |
Along these lines it has been suggested in [167] that the full chord length distribution can be obtained directly from small angle scattering experiments.
Contact and chord length distributions provide much more
geometrical information about the porous medium than the
porosity and specific surface area, and are at the same
time not as unnecessarily detailed as the complete
specification of the deterministic or stochastic
geometry.
Depending on the demands on accuracy a contact or chord
length distribution may be specified by 10 to 1000 numbers
irrespective of the microscopic resolution.
This should be compared with
III.A.5 Local Geometry Distributions
III.A.5.a Local Porosity Distribution
Local porosity distributions, or more generally local geometry distributions, provide a well defined general geometric characterization of stochastic porous media. [168, 169, 170, 171, 172, 173, 174, 175]. Local porosity distributions were mainly developed as an alternative to pore size distributions (see section III.A.3). They are intimately related with the theory of finite size scaling in statistical physics [176, 177, 64, 178]. Although fluctuations in the porosities have been frequently discussed [179, 10, 37, 2, 5, 180, 181, 76, 182], the concept of local porosity distributions and its relation with correlation functions was developed only recently [168, 169, 170, 171, 172, 173, 174, 175]. More applications are being developed [183, 184].
Local porosity distributions can be defined for deterministic
as well as for stochastic porous media.
For a single deterministic porous medium consider a partitioning
The local porosity inside a measurement cell
| (3.29) |
where the second equality applies in case of discretized space
and
| (3.30) |
where
| (3.31) |
where
| (3.32) |
Note that in both extreme cases the local porosity density is completely
determined by the total porosity
For a stochastic porous medium the one cell local porosity density function is defined for each measurement cell as
| (3.33) |
where
| (3.34) | ||||
independent of
| (3.35) |
which may in general differ from (3.32) even if
the sample becomes sufficiently large, and mixing holds.
This is an important observation because it emphasizes the
necessity to consider more carefully the infinite volume
limit
If a large deterministic porous medium is just a realization
of a stochastic medium obeying the mixing property, and if the
| (3.36) |
where the right hand side is independent of the choice of
Define the average local porosity
| (3.37) | ||||
where
| (3.38) | ||||
This result is important for two reasons.
Firstly it relates local porosity distributions to correlation
functions discussed above in section III.A.2.
Secondly it shows that the variance depends inversely on
the volume
The
| (3.39) |
where the sets
| (3.40) | ||||
where
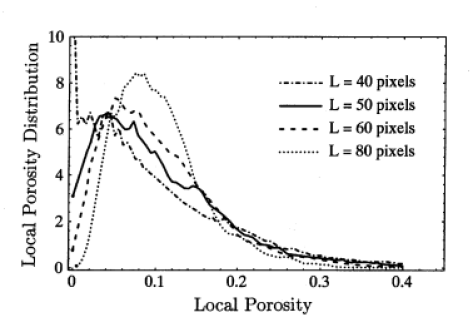
The most important practical aspect of local porosity distributions is that they are easily measurable in an independent experiment. Experimental determinations of local porosity distributions have been reported in [186, 173, 174, 175]. They were obtained from two dimensional sections through a sample of sintered glass beads. An example from [175] is shown in Figure 13.
The porousmedium was made from sintering glass beads
of roughly
The local porosity distribution was then measured using
a square lattice with lattice constant
Measurements of the local porosity distribution from three dimensional pore space images are currently carried out [183]. The pore space is reconstructed from serial sections which is a standard, but costly, technique to obtain threedimensional pore space representations [162, 187, 117, 113, 188, 114, 2, 183]. The advent of synchrotron microtomography [119, 4] and laser scanning confocal microscopy [188a] promises to reduce the cost and effort.
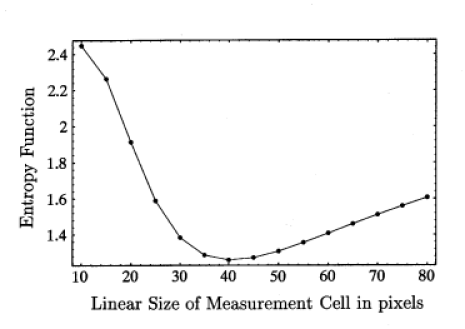
III.A.5.b Local Geometry Entropies
The linear extension
| (3.41) |
relative to the conventional a priori uniform distribution. The so called entropy length is then obtained from the extremality condition
| (3.42) |
That the entropy length
III.A.5.c Local Specific Internal Surface Distributions
Local specific internal surface area distributions are a
natural generalization of local porosity ditributions which
was first introduced in [171] in the
study of fluid transport in porous media.
Define the local specific internal surface area
in a cell
| (3.43) |
which is analogous to equation (3.29). Generalizing equations (3.30) and (3.33) the local specific internal surface area probability density is defined as
| (3.44) |
in analogy with equation (3.33).
The joint probability density
| (3.45) |
The average specific internal surface area in a measurement
region
| (3.46) |
and it represents an important local length scale.
Of course local geometry distributions can be extended to include other well defined geometric characteristics such as mean curvature or topological invariants. The definition of the generalized local geometry distribution is then obtained by generalizing (3.45).
III.A.5.d Local Percolation Probability
In addition to the local porosity distributions and local specific internal surface area distributions it is necessary to characterize the geometrical connectivity properties of a porous medium. This is important for discussing transport properties which depend critically on the connectedness of the pore space, but are less sensitive to its overall porosity or specific internal surface.
Two points inside the pore space
The average local percolation probability defines an important global geometric characteristic
| (3.47) |
which gives the total fraction of percolating
local geometries.
It will be seen in section V.B.4
and V.C.6 that
III.A.5.e Large Scale Local Porosity Distributions
This section reviews the application of recent results in
statistical physics
[190, 63, 64, 65, 178, 66, 67, 68, 69]
to the problem of describing the
macroscopic heterogeneity on all scales.
The original definition (3.33) of the local porosity
distributions depends upon the size and shape of the
measurement cells, respectively on the partitioning
Consider a convex measurement cell
| (3.48) |
Consider
| (3.49) |
obtained from the
| (3.50) |
where
If the sequence of distribution functions of the
random variables
| (3.51) |
where
| (3.52) |
for
Because the limiting distributions have their support in
the interval
| (3.53) |
in terms of the first three integer moments.
Figure 17 displays
the form of
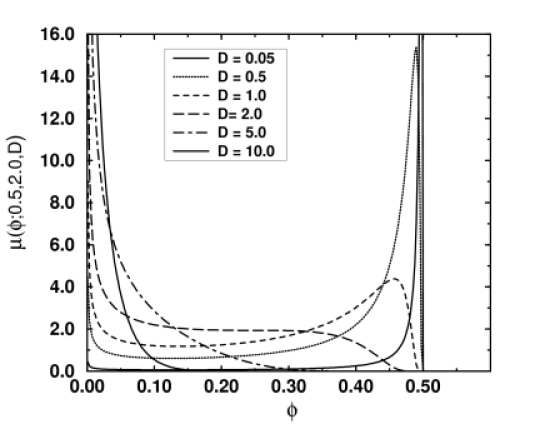
In the limit of small porosities
| (3.54) |
Within local porosity theory this behaviour can give rise
to scaling laws in transport and relaxation properties of
porous media [170].
The importance of universal limiting local geometry
distributions arises from the fact that there exists a class
of limit laws which remains broad even after taking the
macroscopic limit
III.A.6 Capacities
While local porosity distributions (in their one cell form) give a useful practical characterization of stochastic porous media they do not characterize the medium completely. A complete characterization of a stochastic medium is given by the so called Choquet capacities [72, 10]. Although this characterization is very important for theoretical and conceptual purposes it is not practical because it requires to specify the set of “all” compact subsets (see discussion in section II.B.2).
Consider the pore space
| (3.55) |
where Pr is the probability law governing the random set
| (3.56) |
and
Choquet’s theorem says that the converse is also true.
Explicitly, if
| (3.57) |
for all
The main problem with this theoretically important result
is that the family of hitting sets
